

Aujourd’hui notre Team de développement de drivers vous présente une série de mises à jour de drivers qui concerne des voitures essence plus très récentes mais encore répandues et très intéressantes pour le chip-tuning. Nous avons décidé de prendre en charge les drivers les plus datés et de les mettre à jour avec de nouvelles cartographies et formules de conversion corrigées, pour permettre à tous les adeptes du tuning d’effectuer le meilleur chip-tuning possible.
Voici une petite liste des voitures et des ECU montés à bord :
- Alfa Romeo 155 2000 16V Turbo Q4 190PS Marelli IAW 4W6.P8
- Alfa Romeo 156 1600 16V Twin-Spark 120PS Bosch M1.5.5
- Audi A4 (B5) 1800 20V Turbo 150PS Bosch M3.2
- Bmw Serie 3 E36 325i 2500 24V 192PS Bosch M3.1
- Ferrari 348 3400 V8 320PS Bosch M2.7
- Fiat Coupé 2000 16V Turbo 190PS Marelli IAW 4WF.P8
- Fiat Punto GT 1400 Turbo 136PS Bosch M2.7/Latch
- Ford Sierra Cosworth 2000 16V Turbo 220PS 4X4 Marelli IAW 045.01
- Ford Sierra Cosworth 2000 16V 204PS Marelli IAW 048.01
- Lada Niva 1700 8V 80PS Bosch MP7.0
- Opel Astra G 1400 16V Ecotec 90PS Delco Multec
- Opel Tigra 1400 16V 85PS Delco Multec
- Renault 21 2000 Turbo 162PS Siemens Bendix
- Renault Clio II RS 2000 16V 172PS Siemens Sirius 32
- Renault Clio II RS 2000 16V 172PS Siemens Sirius 34
- Renault Megane Coach 2000 16V 147PS Siemens Fenix 5
- Saab 93 2000 Turbo 150PS Trionic T5
- Volkswagen Corrado G60 1800 160PS Bosch Digifant
- Volkswagen Golf III 2800 VR6 174PS Bosch M2.9
- Volvo S70 2000 Turbo 180PS Bosch M4.3
Examinons maintenant certaines d’entre elles en allant examiner les cartographies présentes dans le driver.
Alfa Romeo 155 2000 Turbo 16V Q4 190PS Marelli IAW 4W6.P8

Produite à partir de 1992, la version Q4 est dotée de traction intégrale et de moteur 2000 turbo avec distribution double arbre 16 soupapes et avec carter en fonte dérivé directement de la Lancia Delta Intégrale.
La traction est intégrale permanente, avec le différentiel libre avant, le viscocoupleur central et le différentiel autobloquant Torsen à l’arrière.
Ce moteur distribue 190PS à 6000rpm et 297Nm à 2900rpm. Il permet une accélération de 0 à 100km/h en 7 secondes et atteint les 225km/h de vitesse maximale.
L’ECU est un Magneti Marelli IAW 4W6 et monte une EPROM 27C256 lisible avec lecteur d’EPROM.
Voici les cartographies principales présentes dans le driver à peine mis à jour :
Avance cartographie de base
Cette cartographie représente l’avance moteur utilisée dans un état de fonctionnement normal du véhicule, sur la base du nombre de tours moteur et de la charge/pression exprimée en bars. La cartographie est exprimée en degrés.

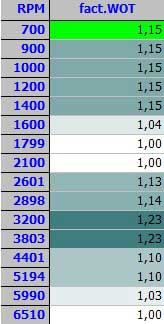
Injection enrichissement
Contrôle l’enrichissement de carburant avec WOT (wide open throttle). Elle est exprimée en factor WOT.
Temps d’injection
Cette cartographie contrôle pendant combien de temps les injecteurs resteront ouverts et donc combien de carburant sera injecté. Elle est exprimée en millisecondes (ms) et fonctionne comme la cartographie d’avance sur la base des tours moteur et la charge/pression exprimée en bars.

Wastegate duty cycle
Contrôle la pression turbo, qui est obtenue à travers l’ouverture/fermeture de la soupape Pierburg (wastegate). Elle est exprimée en fonction des tours moteur et des degrés TPS.

Limiteur de tours
Nous avons enfin deux cartographies de limiteur de tours, celle plus élevée qui exprime les tours auxquels l’injection réduit et une seconde (plus basse) qui indique quand l’injection ne réduit plus.
Bmw Serie 3 E36 325i 2500 24V 192PS Bosch M3.1

Voiture produite de 1990 à 2000, la 325i était la version de pointe équipée avec le double arbre M50 de 2494 cm³ d’une puissance maximale de 192PS à 5900rpm et couple de 245Nm à 4200rpm.
Les versions de 325i ont été équipées avec deux types de moteurs différents :
- M50B25 sans variateur de phase
- M50B25TU avec variateur de phase VANOS
Notre driver est relatif à la version M50B25TU avec Vanos. L’ECU est un Bosch M3.1 et monte une EPROM 27C512 lisible avec lecteur d’EPROM.
Voici les nouvelles cartographies :
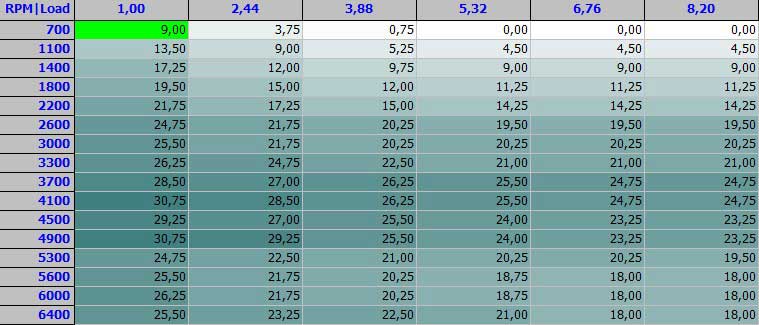
Avance à pleine charge
Cette cartographie représente l’avance moteur utilisée quand se vérifient les conditions de pleine charge (accélération maximale) sur la base du nombre de tours moteur et de la charge. La cartographie est exprimée en degrés.
Avance correction f(ECT)
Exprime la correction en degrés de l’avance en fonction de la température du liquide de refroidissement (Engine coolant temperature).

Injection à charge partielle
Exprimée en Lambda, en fonction de la charge et des tours moteur, représente l’injection à charge partielle. Comme nous le voyons dans le tableau, lors de l’augmentation de la charge et des tours moteur le lambda s’abaisse, donc le mélange sera plus gras.

Limiteur de tours et vitesse
Nous avons enfin la cartographie relative aux limiteurs de tours et à la vitesse maximale atteignable.


Lada Niva 1700 8V 80PS Bosch MP7.0

Produite à partir de 1977, elle a subi au cours des ans juste quelques restylages et une petite modernisation. Le projet de la Niva était assez innovant pour l’époque parce qu’il arrivait à unir des caractéristiques propres à l’actuelle catégorie des Sport Utility Vehicles (la caisse autoporteuse, bien que de type tout-terrain), et la traction intégrale permanente obtenue avec différentiel central avec des caractères d’offroader pur (vitesses courtes, pont rigide arrière, blocage manuel et total du troisième différentiel, angles caractéristiques notables, empattement court), avec en plus la particularité absolue de l’indépendance du système réducteur-blocage différentiel de façon à permettre l’insertion des vitesses courtes même sans avoir bloqué le différentiel et vice-versa, garantissant ainsi la plus grande précision de direction possible. Une solution, cette dernière, dont jusqu’à aujourd’hui ne peuvent se vanter que peu de tout-terrains (Land Rover, Toyota Land Cruiser et Mercedes-Benz Classe G).
Encore aujourd’hui la Niva est choisie dans plus de 150 pays non seulement pour sa robustesse très prononcée et sa simplicité de construction : tout est encore rigoureusement manuel, tout à l’avantage de la fiabilité et de la facilité d’entretien et de réparation, tandis que toute ingérence électronique est absente, pour un plaisir de conduite maximal; mais elle est choisie aussi pour sa grande versatilité d’utilisation : un vrai tout-terrain cependant doté d’une carrosserie d’utilitaire et d’une habitabilité nettement supérieure à ses concurrents directs.
Actuellement la marque historique « Niva » a été cédée à Chevrolet (groupe GM), tandis que le modèle classique de Niva continue désormais à être produit sous le nom de Lada 4×4 pour les marchés nord européens tandis que dans le reste de l’Europe la voiture continue à être appelée Niva.
Le moteur est un 1700 8V qui distribue 80PS à 5400rpm et 131Nm de couple à 3200rpm. Le calculateur est un Bosch MP7.0 avec EPROM 28F200 qui peut se lire avec lecteur d’EPROM
Voici les nouvelles cartographies du driver mis à jour :
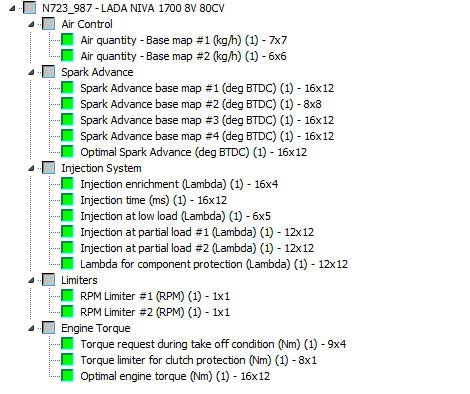
Avance moteur optimale
Cette cartographie représente la limitation d’avance moteur, c’est-à-dire les valeurs maximales d’avance qu’un moteur spécifique peut atteindre de façon à prévenir tout dommage ; celle-ci est exprimée en degrés avant le PMS, à bas tours moteur et hautes valeurs de charge. Cette cartographie peut avoir quelques valeurs négatives qui signifient des retards.

Injection à charge partielle
Exprimée en Lambda, en fonction des ms d’ouverture des injecteurs et des tours moteur, elle représente l’injection à charge partielle.

Couple moteur optimal
Cette cartographie représente le couple optimal que devrait atteindre le moteur en fonction des tours moteur et ms d’ouverture des injecteurs.

Renault Clio II RS 2000 16V 172PS Siemens Sirius 32

Elle a été produite de 1998 à 2012 et sa version la plus sportive, la RS, était dotée d’un moteur 2000 16V (code moteur F4R) capable de distribuer 172PS à 6250rpm et 200Nm de couple à 5400rpm.
Cette variante du moteur F4R est l’unique unité F4R à rester ancrée aux impératifs des précédents moteurs “Fonte”, parce qu’il est l’unique moteur F4R doté d’un carter en fonte. De fait une évolution du moteur F7R. De ce dernier ont été revus les collecteurs, aussi bien d’admission que d’échappement, la culasse et la distribution, avec de nouveaux paramètres de phase. Cette phase était de toute façon variable sur le côté admission grâce au nouveau variateur de phase. De plus, les soupapes sont réalisées dans un nouvel alliage, plus résistant aux sollicitations plus importantes et les bougies sont dotées d’électrode au platine.
L’ECU monté est un Siemens Sirius 32 qu’il est possible de lire avec KESSv2 famille 34 et avec KTAG famille 336. Est présente une EPROM 29F200 qui peut se lire aussi avec lecteur d’EPROM.
Voyons maintenant les cartographies du nouveau driver :
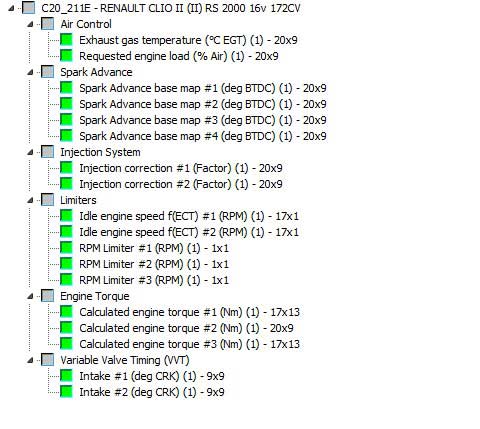
Avance cartographie de base
Dans ce cas aussi une des cartographies les plus importantes est celle d’avance. Cette cartographie représente l’avance moteur utilisée dans un état de fonctionnement normal du véhicule, sur la base du nombre de tours moteur et de la charge/pression exprimée en bars, l’unité de mesure de la cartographie est exprimée en degrés BTDC. Comme nous pouvons le voir l’axe des mbars rejoint au maximum la pression atmosphérique justement parce que la voiture n’est pas turbo.

Température gaz d’échappement
Exprime la température admise des gaz d’échappement en fonction des tours moteur et de la pression.

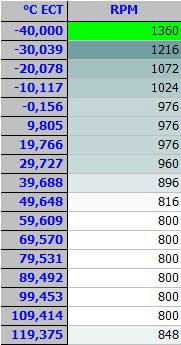
Tours moteur au minimum
Nous avons ensuite les tours moteur au minimum en fonction de la température du liquide de refroidissement.
Aspiration
Sont présentes aussi les cartographies de phase variable en fonction des tours moteur et de la pression en mbars.





