

Hoy, nuestro equipo de desarrollo drivers os presenta una serie de actualizaciones de drivers que se refieren a autos de gasolina no recientes, pero todavía difundidos y muy interesantes para el chiptuning.
Hemos decidido encargarnos de los drivers más viejos y actualizarlos con nuevos mapas y fórmulas de conversión correctas, para darle la posibilidad a todos los tuners de efectuar el mejor chiptuning posible.
He aquí un pequeña lista de los automóviles y de las ECU montadas a bordo:
- Alfa Romeo 155 2000 16V Turbo Q4 190PS Marelli IAW 4W6.P8
- Alfa Romeo 156 1600 16V Twin-Spark 120PS Bosch M1.5.5
- Audi A4 (B5) 1800 20V Turbo 150PS Bosch M3.2
- Bmw Serie 3 E36 325i 2500 24V 192PS Bosch M3.1
- Ferrari 348 3400 V8 320PS Bosch M2.7
- Fiat Coupè 2000 16V Turbo 190PS Marelli IAW 4WF.P8
- Fiat Punto GT 1400 Turbo 136PS Bosch M2.7/Latch
- Ford Sierra Cosworth 2000 16V Turbo 220PS 4X4 Marelli IAW 045.01
- Ford Sierra Cosworth 2000 16V 204PS Marelli IAW 048.01
- Lada Niva 1700 8V 80PS Bosch MP7.0
- Opel Astra G 1400 16V Ecotec 90PS Delco Multec
- Opel Tigra 1400 16V 85PS Delco Multec
- Renault 21 2000 Turbo 162PS Siemens Bendix
- Renault Clio II RS 2000 16V 172PS Siemens Sirius 32
- Renault Clio II RS 2000 16V 172PS Siemens Sirius 34
- Renault Megane Coach 2000 16V 147PS Siemens Fenix 5
- Saab 93 2000 Turbo 150PS Trionic T5
- Volkswagen Corrado G60 1800 160PS Bosch Digifant
- Volkswagen Golf III 2800 VR6 174PS Bosch M2.9
- Volvo S70 2000 Turbo 180PS Bosch M4.3
Ahora, examinemos algunos de éstos inspeccionando los mapas presentes en el driver.
Alfa Romeo 155 2000 Turbo 16V Q4 190PS Marelli IAW 4W6.P8

Producida a partir de 1992, la versión Q4 está dotada de tracción integral y motor 2000 turbo con distribución de doble árbol de levas de 16 válvulas y con una plataforma en hierro fundido proveniente directamente del Lancia Delta Integral.
La tracción es integral permanente, con el diferencial anterior libre, el acoplamiento viscoso central y el diferencial autoblocante tipo Torsen en la parte posterior.
Este motor suministra 190PS a 6000rpm y 297Nm a 2900rpm. Permite una aceleración de 0 a 100km/h en 7 segundos y logra 225km/h de velocidad máxima.
A continuación, los mapas principales presentes en el driver apenas actualizado:
Mapa base de encendido
Este mapa representa el avance de encendido del motor usado en un estado de funcionamiento normal del vehículo, en base al número de revoluciones del motor y de la carga/presión expresada en bar; el mapa está expresado en grados.

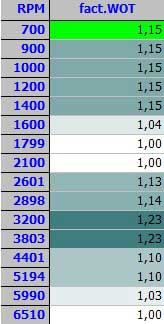
Enriquecimiento de la inyección
Controla el enriquecimiento de combustible para WOT (wide open throttle). Está expresado en factor WOT.
Tiempo de inyección
Este mapa controla por cuánto tiempo los inyectores permanecerán abiertos y así poder controlar cuánto combustible es inyectado. Está expresado en milisegundos (ms) y funciona como el mapa de anticipación, en base a las revoluciones del motor y la carga/presión expresada en bar.

Wastegate Duty Cycle
Controla la presión turbo, ésta se obtiene a través de la abertura/cierre de la válvula Pierburg (Wastegate). Está expresado en función de las revoluciones del motor y de los grados TPS.

Limitador de revoluciones
Por último, tenemos dos mapas de limitador de revoluciones, aquél más alto que expresa las revoluciones que corta la inyección y otro (más bajo) que indica cuando la inyección ya no corta más.
Bmw Serie 3 E36 325i 2500 24V 192PS Bosch M3.1

Automóvil producido desde 1990 hasta 2000, el 325i era la versión de punta equipada con el doble árbol de levas M50 de 2494 cm³, con una potencia máxima de 192PS a 5900rpm y par de 245Nm a 4200rpm.
Las versiones de 325i fueron equipadas con dos tipos de motores distintos:
- M50B25 sin sincronización variable
- M50B25TU con sincronización variable VANOS
Nuestro driver es el relativo a la versión M50B25TU con Vanos. La ECU es una Bosch M3.1 y monta una eprom 27C512 legible con lector de eprom.
A continuación, los nuevos mapas:
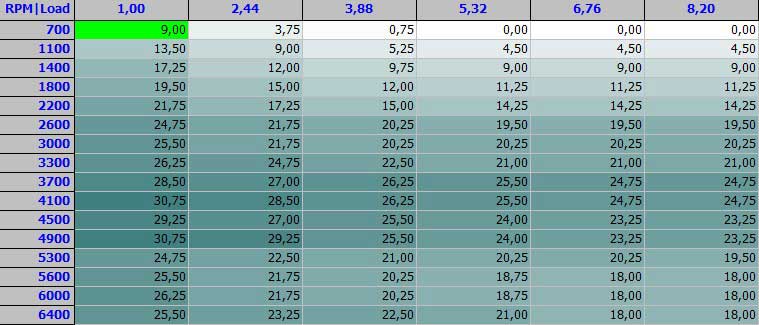
Avance de encendido a plena carga
Este mapa representa la avance de encendido del motor usado cuando se verifican las condiciones a plena carga (máxima aceleración), en base al número de revoluciones del motor y de la carga. El mapa está expresado en grados.
Corrección del avance de encendido f(ECT)
Expresa la corrección de la anticipación en grados, en función de la temperatura del líquido refrigerante (Engine Coolant Temperature).

Inyección a carga parcial
Expresado en Lambda, en función de la carga y las revoluciones del motor, representa la inyección a carga parcial. Como vemos en la tabla, con el aumento de la carga y de las revoluciones del motor, la lambda disminuye y así la mezcla será más grasa.

Limitador de revoluciones y velocidad
Por último, tenemos el mapa relativo a los limitadores de revoluciones y a la velocidad máxima conseguida.


Lada Niva 1700 8V 80PS Bosch MP7.0

Producido desde 1977, ha sufrido en los años solo algunos cambios de imagen y una pequeña modernización. El proyecto del Niva era muy innovador para la época porque alcanzaba unir características propias de la actual categoría de los Sport Utility Vehicles (la carrocería portante, si bien de tipo todoterreno), con la tracción integral permanente obtenida con el diferencial central con carácter de offroader puro (reductoras, puente posterior rígido, bloqueo manual y total del tercer diferencial, notables ángulos característicos, paso muy corto), y además, con la peculiaridad absoluta de la independencia del sistema de bloqueo de la caja de engranajes diferencial para permitir la inserción de las marchas reductoras de igual modo, sin haber bloqueado el diferencial y viceversa, garantizando así la máxima direccionalidad posible. Una solución, esta última, que todavía hoy presumen poquísimos todoterrenos (Land Rover, Toyota Land Cruiser y Mercedes-Benz Clase G).
Todavía hoy, el Niva se prefiere en más de 150 países, no solo por su notable robustez y sencillez de construcción: aún ahora, todo es rigurosamente manual, a gran ventaja de la confiabilidad y de la facilidad de mantenimiento y reparación, mientras se encuentra ausente cualquier injerencia electrónica para el máximo placer de conducción; pero también se prefiere por su gran versatilidad de uso: un todoterreno verdadero, pero dotado de carrocería de coche pequeño y de una habitabilidad meramente superior a sus directos competidores.
Actualmente, la histórica marca «Niva» ha sido cedida a la Chevrolet (grupo GM), mientras que el modelo clásico de Niva, hoy sigue siendo producido con la denominación de Lada 4×4 para los mercados del norte de Europa, mientras que, en el resto de Europa, el automóvil sigue siendo llamado Niva.
El motor es un 1700 8V que suministra 80PS a 5400rpm y 131Nm de par a 3200rpm. La centralita es una Bosch MP7.0 con Eprom 28F200, que se puede leer con lector de Eprom.
Estos son los nuevos mapas del driver actualizado:
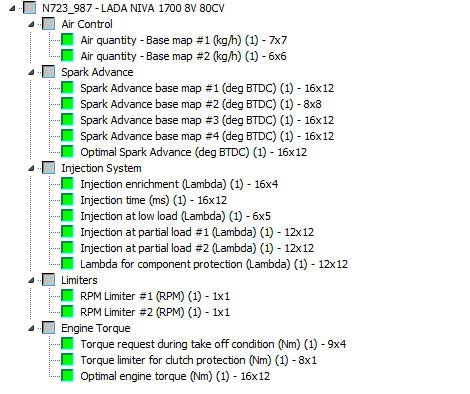
Avance de encendido óptimo
Este mapa representa la limitación de anticipación del motor, es decir, los valores máximos de anticipación que un motor específico puede conseguir en modo tal de prevenir cualquier daño; éste se expresa en grados antes del PMS y a bajas revoluciones del motor y altos valores de carga. Este mapa puede tener algunos valores negativos que significan retrasos.

Inyección a carga parcial
Expresado en Lambda, en función de los ms de abertura de los inyectores y de las revoluciones del motor, representa la inyección a carga parcial.

Par motor óptimo
Este mapa representa el par óptimo que debería conseguir el motor en función de las revoluciones del motor y los ms de abertura de los inyectores.

Renault Clio II RS 2000 16V 172PS Siemens Sirius 32

Fue producido desde 1998 hasta 2012 y su versión más deportiva, la RS, tenía en dotación un motor 2000 16V (código del motor F4R), capaz de suministrar 172PS a 6250rpm y 200Nm de par a 5400rpm.
Esta variedad del motor F4R es la única unidad F4R en permanecer anclada en los preceptos de los precedentes motores “Fonte”, ya que es el único motor F4R dotado de plataforma en hierro fundido. De hecho, es una evolución del motor F7R. De este último fueron revisados los colectores, tanto de aspiración como de escape, el cabezal y la distribución, con nuevos parámetros de sincronización. Tal sincronización, de todos modos, era variable en el lado de aspiración gracias al nuevo variador de fase. Además, las válvulas están realizadas en una nueva aleación, más resistente a los esfuerzos mayores y las bujías están dotadas de electrodos en platino.
La Ecu montada es una Siemens Sirius 32, que es posible leer con KESSv2 prt 34 y con KTAG prt 336. Está presente una eprom 29F200 que se puede leer también con lector de eprom.
Ahora, veamos los mapas del nuevo driver:
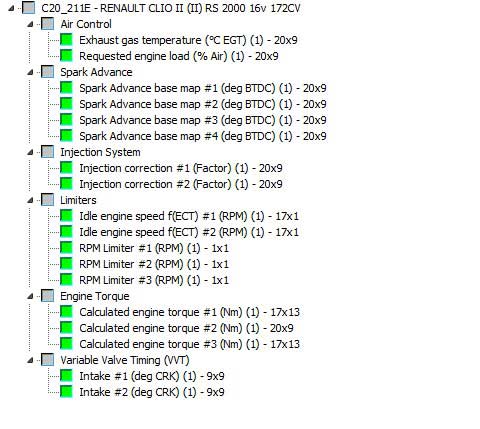
Avance de encendido mapa base
También en este caso, uno de los mapas más importantes es el del avance de encendido. Este mapa representa la avance de encendido del motor usado en un estado de normal funcionamiento del vehículo, en base al número de revoluciones del motor y de la carga/presión expresada en bar, la unidad de medida del mapa está expresada en grados BTDC. Como podemos ver, el eje de los mbar consigue al máximo la presión atmosférica justamente porque el coche no es turbo.

Temperatura de los gases de escape
Expresa la temperatura emitida por los gases de escape en función de las revoluciones del motor y de la presión.

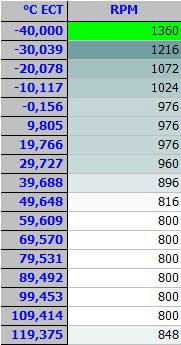
Revoluciones del motor al mínimo
Además, tenemos las revoluciones del motor al mínimo en función de la temperatura del líquido refrigerante.
Aspiración
Están presentes también los mapas de sincronización variable en función de las revoluciones del motor y de la presión en mbar.





